







ROSbot XL
ROSbot XL is a universal, ROS2-native autonomous mobile robot platform dedicated for indoor applications. It can be used not only as a base for your next robotic product, but also for research and rapid prototyping.
ROSbot XL mobile platform contains:
- One of three powerful SBCs (Raspberry Pi 5, Nvidia Jetson Orin Nano, ASUS NUC 14)
- IMU: Bosch BNO055 (accelerometer + gyro)
- 4 x DC motors equipped with quadrature encoders
- Built-in USB hub
- Built-in Li-Ion 3S battery (11,1V 7800 mAh 86Wh)
- Power board with advanced energy management (USB-C Power Delivery compatible, protection circuits)
- Selectable power for SBC supply (5V, 12V, 19V)
- Programmable perimeter LEDs and a speaker
- Ethernet based communication between SBC and STM32F4 based digital controller
- Universal mounting plate (for LIDARs, robot arms etc.)
ROSbot XL Configuration Packages
Each ROSbot XL mobile platform comes equipped with:
- A USB-C charger (65W)
- Two sets of wheels (4x regular and 4x mecanum).
- Logitech F710 gamepad
The basic ROSbot XL package can be outfitted with a wide range of sensors and actuators available for purchase in our online store. For ease of use, we also provide a selection of pre-configured options. These configurations have been rigorously tested and are supported by open-source reference projects.
Choose from seven different configuration packages:
1. Basic Package (Raspberry Pi 5)
The set contains:
- ROSbot XL mobile platform with Raspberry Pi 5B (8GB RAM) + 64GB microSD
2. Basic Package (ASUS NUC 14)
The set contains:
-
ROSbot XL mobile platform with ASUS NUC 14 (Core 3 +16GB RAM + 250GB SSD)
3. Basic Package (NVIDIA Jetson Orin Nano)
The set contains:
- ROSbot XL mobile platform with NVIDIA Jetson Orin Nano (8GB RAM + 250GB SSD)
4. Telepresence Package
Select this package if you are planning to manually control ROSbot XL in two different scenarios: over web user interface or from RViz. Both setups work not only in LAN but also over the Internet.. A dedicated reference project is available here.
The set contains:
-
ROSbot XL mobile platform with ASUS NUC 14 (Core 3 +16GB RAM + 250GB SSD)
- Luxonis OAK-1 Lite camera
- USB 3.0 type C cable for OAK-1 Lite camera
- Camera holder
5. Autonomy Package
Select this package if you are planning to run autonomous mapping and navigation algorithms on your ROSbot XL. A dedicated reference project is available here.
The set contains:
- ROSbot XL mobile platform with ASUS NUC 14 (Core 3 +16GB RAM + 250GB SSD)
- SLAMTEC RPLIDAR S3
- Luxonis OAK-D Pro camera
- USB 3.0 type C cable for OAK-D Pro camera
- Camera holder
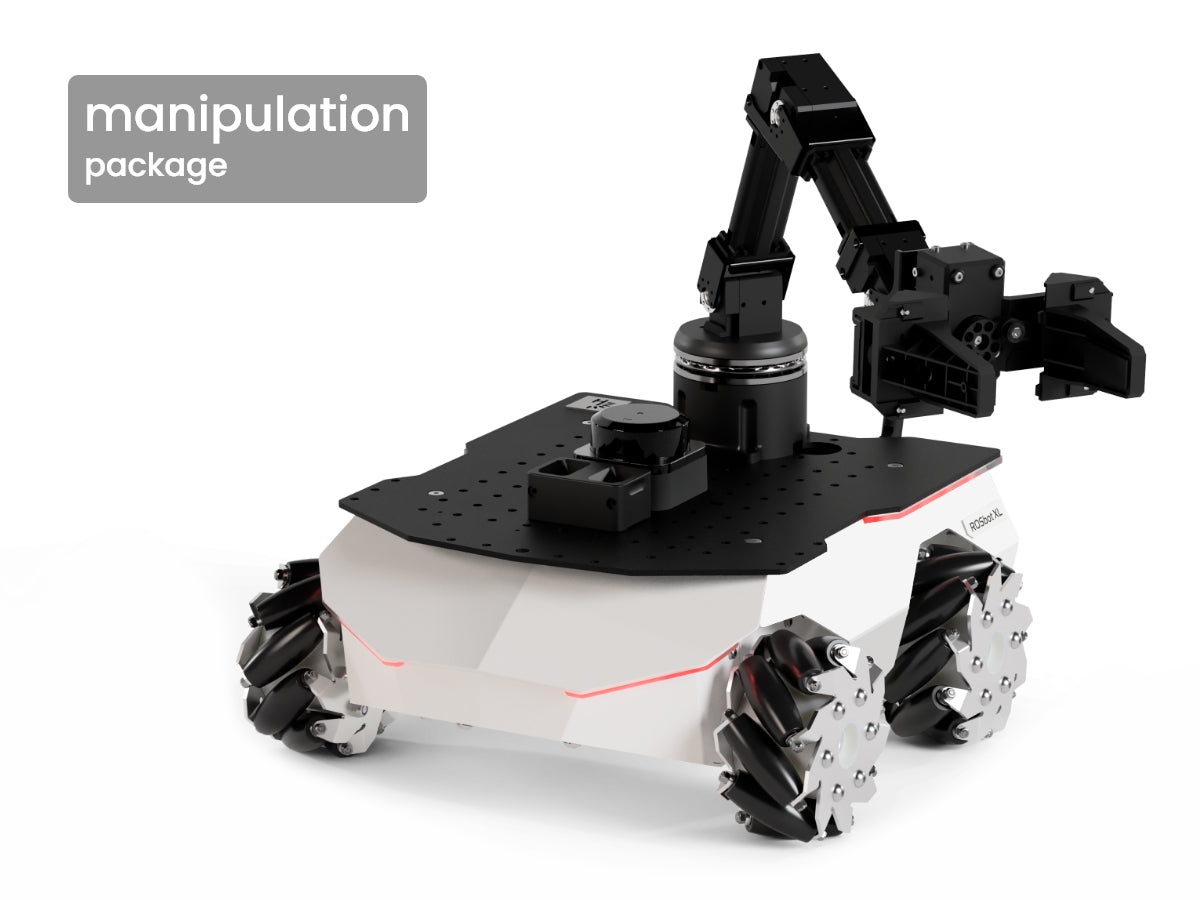
6. Manipulation Package
Select this package if you are planning to perform mobile manipulation tasks which include autonomous navigation. A dedicated reference project is available here.
The set contains:
-
ROSbot XL mobile platform with ASUS NUC 14 (Core 3 +16GB RAM + 250GB SSD)
- SLAMTEC RPLIDAR S3
- OpenMANIPULATOR-X manipulator with a gripper by Robotis
- Control board for the manipulator
- Custom manipulator holder with a bearing
7. Manipulation PRO Package
Select this package if you are planning to perform mobile manipulation tasks which include autonomous navigation and advanced vision capabilities (object recognition and handling). A dedicated reference project is available here.
The set contains:
- ROSbot XL mobile platform with NVIDIA Jetson Orin Nano (8GB RAM + 250GB SSD)
- SLAMTEC RPLIDAR S3
- OpenMANIPULATOR-X manipulator with a gripper by Robotis
- Control board for the manipulator
- Custom manipulator holder with a bearing
- Stereolabs ZED Mini Stereo Camera
- USB cable for the camera
NOTE: Delivery of selected options may be longer than expected depending on final configuration and quantity.
Resources
To request a quote for this robot, contact us at sales@husarion.com.